
85mm Nema34 હાઇબ્રિડ સ્ટેપર મોટર 6.8 Nm 3 લીડ વાયર 1.2 સ્ટેપ એંગલ

વિશિષ્ટતાઓ
| ઉત્પાદન નામ | હાઇબ્રિડ સ્ટેપર મોટર |
| પગલાની ચોકસાઈ | ± 5% |
| તાપમાનમાં વધારો | 80 ℃ મહત્તમ |
| ઇન્સ્યુલેશન પ્રતિકાર | 100MΩ ન્યૂનતમ.500VDC |
| આસપાસનું તાપમાન | -20℃~+50℃ |
| ડાઇલેક્ટ્રિક સ્ટ્રેન્થ | 500VAC 1 મિનિટ |
| મેક્સ રેડિયલ ફોર્સ | 220N (ફ્રન્ટ ફ્લેંજથી 20mm) |
| મહત્તમ અક્ષીય બળ | 60N |
| સ્ટેપ એંગલ | 1.2° |
| લીડ વાયર નંબર | 3 |
| મોટર વજન (કિલો) | 1.7/2.9/4.0 |
ઉત્પાદન વર્ણન
85mm Nema34 હાઇબ્રિડ સ્ટેપર મોટર 2 Nm 3 લીડ વાયર 1.2 સ્ટેપ એંગલ
હાઇબ્રિડ સ્ટેપર મોટરને એક પછી એક દરેક સ્ટેટરને એનર્જી કરીને નિયંત્રિત કરી શકાય છે.તેથી સ્ટેટર ચુંબકીકરણ કરશે અને ઇલેક્ટ્રોમેગ્નેટિક ધ્રુવની જેમ કાર્ય કરશે જે આગળ વધવા માટે રોટર પર પ્રતિકૂળ ઊર્જાનો ઉપયોગ કરે છે.સ્ટેટરનું વૈકલ્પિક ચુંબકીકરણ તેમજ ડિમેગ્નેટાઇઝિંગ રોટરને ધીમે ધીમે શિફ્ટ કરશે અને તેને મહાન નિયંત્રણ દ્વારા ચાલુ કરવાની મંજૂરી આપે છે.
સ્ટેપર મોટર કાર્યકારી સિદ્ધાંત ઇલેક્ટ્રો-મેગ્નેટિઝમ છે.તેમાં રોટરનો સમાવેશ થાય છે જે કાયમી ચુંબક સાથે બને છે જ્યારે સ્ટેટર ઇલેક્ટ્રોમેગ્નેટ સાથે હોય છે.એકવાર સ્ટેટરના વિન્ડિંગને પુરવઠો પૂરો પાડવામાં આવે તે પછી સ્ટેટરની અંદર ચુંબકીય ક્ષેત્ર વિકસાવવામાં આવશે.હવે મોટરમાંનું રોટર સ્ટેટરના ફરતા ચુંબકીય ક્ષેત્ર સાથે આગળ વધવાનું શરૂ કરશે.તેથી આ મોટરનો મૂળભૂત કાર્ય સિદ્ધાંત છે
વિદ્યુત સ્પષ્ટીકરણ
| મોડલ | સ્ટેપ એંગલ (°/STEP) | લીડ વાયર (નં.) | વિદ્યુત્સ્થીતિમાન (વી) | વર્તમાન (A/FASE) | પ્રતિકાર (Ω/તબક્કો) | ઇન્ડક્ટન્સ (MH/PHASE) | હોલ્ડિંગ ટોર્ક (NM) | મોટરની ઊંચાઈ L(MM) | મોટર વજન (કિલો ગ્રામ) |
| 85BYGH350A-001 | 1.2 | 3 | 3.1 | 3.1 | 1.0 | 4.1 | 2.0 | 68 | 1.7 |
| 85BYGH350A-002 | 1.2 | 3 | 7.4 | 1.75 | 4.25 | 12.3 | 2.3 | 68 | 1.7 |
| 85BYGH350B-001-17 | 1.2 | 3 | 3.1 | 5.8 | 0.53 | 2.5 | 3.2 | 97 | 2.9 |
| 85BYGH350B-002-02 | 1.2 | 3 | 10.8 | 2.0 | 5.4 | 23.0 | 4.5 | 97 | 2.9 |
| 85BYGH350C-001-02 | 1.2 | 3 | 3.7 | 7.0 | 0.53 | 2.5 | 5.6 | 127 | 4.0 |
| 85BYGH350C-003 | 1.2 | 3 | 21.0 | 3.5 | 6.0 | 25.0 | 6.8 | 127 | 4.0 |
*ઉત્પાદનો ખાસ વિનંતી દ્વારા કસ્ટમાઇઝ કરી શકાય છે.
વાયરિંગ ડાયાગ્રામ

યાંત્રિક પરિમાણ

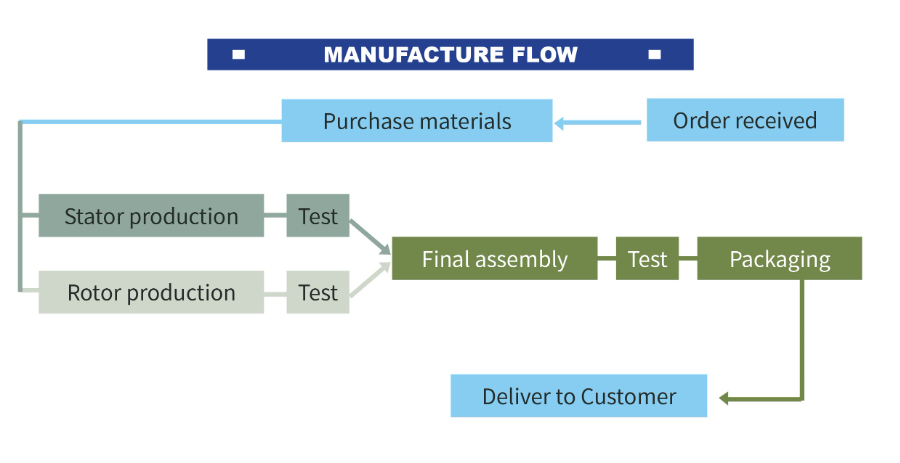
ઉત્પાદન પ્રક્રિયા
અત્યાધુનિક ઉત્પાદન સાધનો





પ્રમાણપત્ર

