39 մմ Nema16 Hybrid Stepper Motor 0.17Nm 4 Leads 1.8 Step Angle





Տեխնիկական պայմաններ
| ապրանքային անուն | Hybrid Stepper Motor |
| Քայլի ճշգրտություն | ± 5% |
| Ջերմաստիճանի բարձրացում | 80 ℃ առավելագույնը |
| Մեկուսացման դիմադրություն | 100MΩ Min.500VDC |
| Մթնոլորտային ջերմաստիճան | -20℃~+50℃ |
| Դիէլեկտրիկ ուժ | 500VAC 1 րոպե |
| Առավելագույն ճառագայթային ուժ | 28N (20 մմ առջևի եզրից) |
| Առավելագույն առանցքային ուժ | 10Ն |
| Քայլի անկյուն | 1,8 ° |
| Կապարի մետաղալարերի համարը | 4 |
| Դիմադրություն | 28Ω |
| Ինդուկտիվություն | 21 մՀ |
ապրանքի նկարագրությունը
39 մմ Nema16 Hybrid Stepper Motor 0.28Nm 4 Leads 1.8 Step Angle 2.8KG
Հիբրիդային քայլային շարժիչի կառուցումը կարող է իրականացվել երկու շարժիչների սկզբունքների կիրառմամբ, ինչպիսիք են մշտական մագնիսը և փոփոխական դժկամության աստիճանային շարժիչը:Այս տեսակի շարժիչները հասանելի են տարբեր աստիճանի լուծաչափերով: Այս շարժիչի ստանդարտ քայլ լուծումը 1,8° է:
Հիբրիդային քայլային շարժիչը ցույց է տալիս բարձր ստատիկ և դինամիկ ոլորող մոմենտ և գործարկման բնութագրեր չափազանց բարձր աստիճանի արագությամբ, ուստի այս շարժիչները հիմնականում օգտագործվում են արդյունաբերական ծրագրերում:Hybrid Stepper շարժիչի հիմնական մասերն են ստատորը և ռոտորը, քանի որ այս երկուսը միացնում են հիբրիդային շարժիչը:Այս շարժիչը ներառում է պրոեկցիաների նման ատամ:Այս ատամները միացված են տարբեր կոնֆիգուրացիաներով ամբողջ ռոտացիայի ընթացքում:
Էլեկտրական Տեխնիկական
| ՄՈԴԵԼ | Քայլի անկյուն (°/Քայլ) | Կապար մետաղալար (ՈՉ) | Լարման (V) | Ընթացիկ (Ա/Փուլ) | Դիմադրություն (Ω/Փուլ) | Ինդուկտիվություն (MH/Փուլ) | Holding Torque (G.CM) | Շարժիչի բարձրությունը L(MM) | Շարժիչի քաշը (ԿԳ) |
| 39BYGX001A | 1.8 | 4 | 13.44 | 0,48 | 28 | 21 | 1000 | 20 | 0.10 |
| 39BYGX002A | 1.8 | 4 | 8.4 | 0.7 | 12 | 11 | 1200 թ | 20 | 0.10 |
| 39BYGX100A | 1.8 | 4 | 12 | 0.4 | 30 | 20 | 1300 թ | 22 | 0.12 |
| 39BYGX200A | 1.8 | 4 | 14.4 | 0.4 | 36 | 33 | 1700 թ | 25 | 0 |
* Ապրանքները կարող են հարմարեցվել հատուկ խնդրանքով:
Միացման դիագրամ

Մեխանիկական չափս

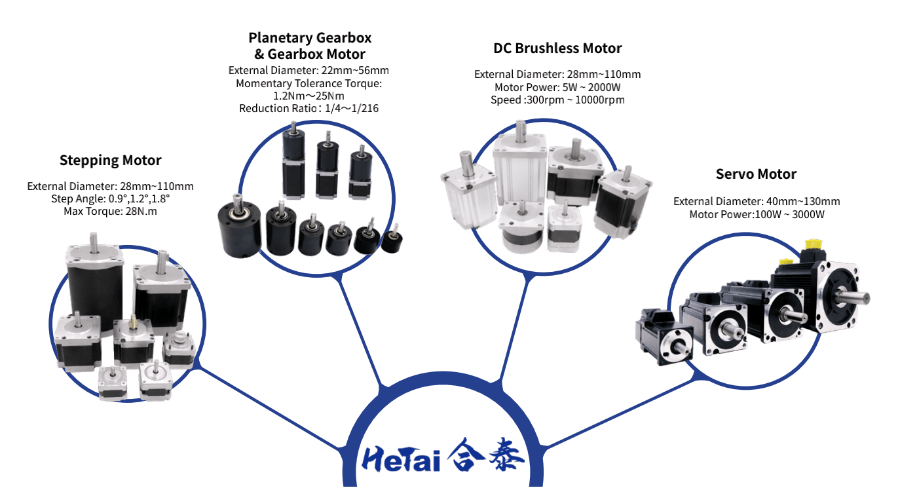
Ապրանքի տեսականին
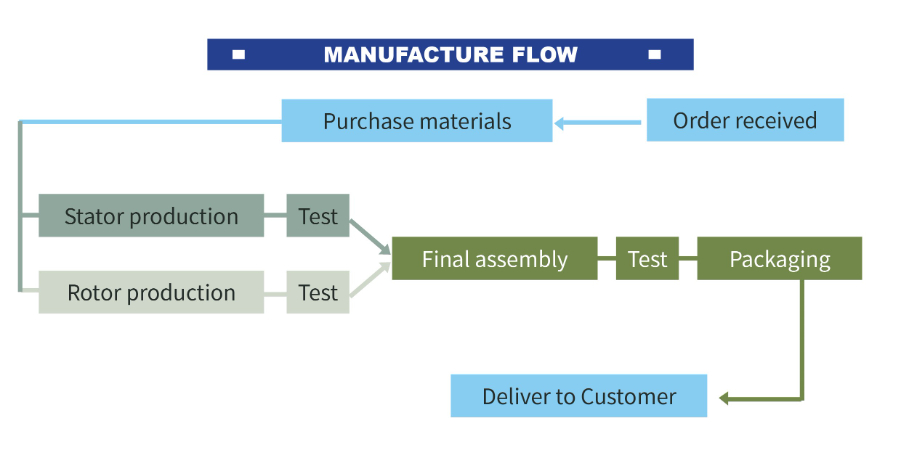
Արտադրական գործընթաց
Ստուգման գործընթաց

Խիստ ստուգման գործընթաց՝ ապահովելու համար, որ յուրաքանչյուր ապրանք որակյալ արտադրանք է, որակը երաշխավորված է։
Ատեստատ