מנוע צעד היברידי Nema11 28 מ"מ 6 חוטים 4 מובילים זווית 1.8 צעדים









מפרטים
| שם מוצר | מנוע צעד היברידי |
| דיוק שלב | ± 5% |
| עליה בטמפרטורות | 80 ℃ מקסימום |
| התנגדות בידוד | 100MΩ Min.500VDC |
| טמפרטורת סביבה | -20℃~+50℃ |
| חוזק דיאלקטרי | 500VAC 1 דקה |
| כוח רדיאלי מרבי | 28N (20 מ"מ מהאוגן הקדמי) |
| כוח צירי מרבי | 10N |
| זווית צעד | 1.8 מעלות |
| מספר לידים | 4 או 6 |
תיאור מוצר
מנוע צעד היברידי Nema11 28 מ"מ 6 חוטים 4 מובילים זווית 1.8 צעדים
השילוב של שני מנועים כמו מגנט קבוע וחוסר רצון משתנה ידוע כמנוע היברידי.עקרון הפעולה של מנוע היברידי הוא, הרוטור במנוע זה ממוגנט צירית בדומה למנוע צעדי מגנט קבוע, בעוד שהסטטור מופעל בצורה אלקטרומגנטית בדומה למנוע צעדים בעל חוסר רצון משתנה.אז זהו מפעיל שמשנה פולסים חשמליים לתזוזה זוויתית.
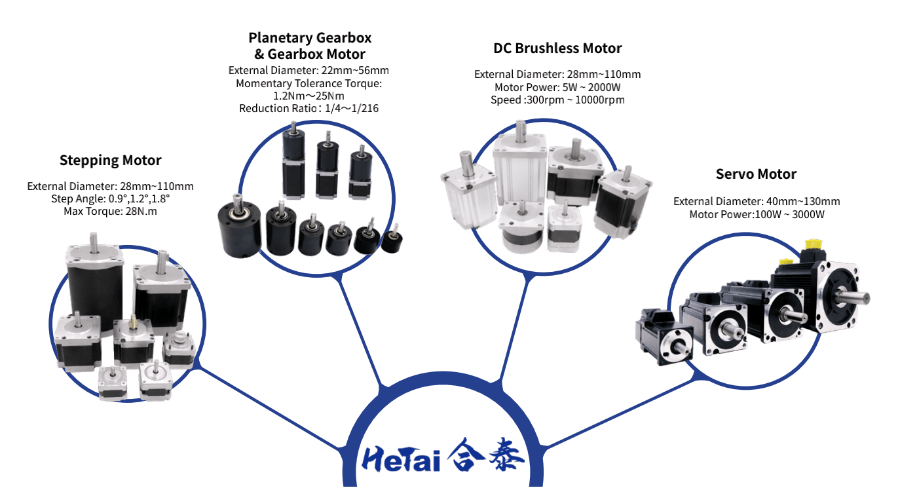
בהשוואה לסוגים אחרים, מנוע צעד היברידי מספק מומנט גבוה כולל זווית צעדים פחות ויש לו תכונה דינמית טובה.באופן דומה, השימוש במנועי צעד גדל גם בתחומים שונים כמו רובוטיקה, אוטומציה תעשייתית, רפואי וכו'.
מנועי צעד היברידיים זמינים בסוגים שונים, כלומר בסיסי, מקודד, IP65, בלם, סוג משולב כולל הנעה ובקר, בלם וגיר.
מפרט חשמלי
| דֶגֶם | זווית צעד (°/צעד) | חוט עופרת (לא.) | מתח (V) | נוֹכְחִי (A/PHASE) | הִתנַגְדוּת (Ω/PHASE) | הַשׁרָאוּת (MH/PHASE) | מומנט מחזיק (G.CM) | גובה מנוע L(MM) | משקל מנוע (ק"ג) |
| 28BYGH102-01 | 1.8 | 4 | 3.90 | 0.67 | 6.3 | 3.2 | 600 | 32 | 0.11 |
| 28BYGH105-01 | 1.8 | 6 | 3.1 | 0.95 | 3.3 | 1.0 | 430 | 32 | 0.11 |
| 28BYGH301 | 1.8 | 4 | 4.56 | 0.67 | 6.8 | 4.9 | 950 | 45 | 0.17 |
| 28BYGH303 | 1.8 | 6 | 3.40 | 0.95 | 3.4 | 1.0 | 750 | 45 | 0.14 |
| 28BYGH501 | 1.8 | 4 | 8.04 | 0.67 | 12.0 | 7.2 | 1200 | 51 | 0.19 |
| 28BYGH502 | 1.8 | 6 | 3.80 | 0.95 | 4.0 | 1.3 | 900 | 51 | 0.20 |
*ניתן להתאים מוצרים לפי בקשה מיוחדת.
תרשים חיווט

מימד מכני

עיקרון בנייה ועבודה
הבנייה של מנוע צעד קשורה למדי למנוע DC.הוא כולל מגנט קבוע כמו רוטור שנמצא באמצע והוא יסתובב ברגע שכוח יפעל עליו.רוטור זה סגור דרך מס'.של הסטטור שמלופף דרך סליל מגנטי על כולו.הסטטור מסודר ליד הרוטור כך ששדות מגנטיים בתוך הסטטורים יכולים לשלוט בתנועת הרוטור.
תְעוּדָה