מנוע צעד היברידי Nema16 39 מ"מ 0.17Nm 4 מובילים זווית 1.8 צעדים





מפרטים
| שם מוצר | מנוע צעד היברידי |
| דיוק שלב | ± 5% |
| עליה בטמפרטורות | 80 ℃ מקסימום |
| התנגדות בידוד | 100MΩ Min.500VDC |
| טמפרטורת סביבה | -20℃~+50℃ |
| חוזק דיאלקטרי | 500VAC 1 דקה |
| כוח רדיאלי מרבי | 28N (20 מ"מ מהאוגן הקדמי) |
| כוח צירי מרבי | 10N |
| זווית צעד | 1.8 מעלות |
| מספר חוט עופרת | 4 |
| הִתנַגְדוּת | 28Ω |
| הַשׁרָאוּת | 21mH |
תיאור מוצר
מנוע צעד היברידי Nema16 39 מ"מ 0.28Nm 4 מובילים 1.8 צעד זווית 2.8KG
בניית מנוע צעד היברידי יכולה להיעשות באמצעות העקרונות של שני מנועים כמו מגנט קבוע ומנוע צעדי חוסר רצון משתנה.סוגים אלה של מנועים זמינים ברזולוציות צעדים שונות. רזולוציית הצעד הסטנדרטית של מנוע זה היא 1.8°.
מנוע הצעד ההיברידי מציג מאפייני מומנט והפעלה סטטיים ודינמיים גבוהים בקצבי צעדים גבוהים במיוחד, לכן מנועים אלה משמשים בעיקר ביישומים תעשייתיים.החלקים החיוניים במנוע צעד היברידי הם סטטור ורוטור מכיוון ששני אלה מחברים את המנוע ההיברידי.מנוע זה כולל שן הדומה להקרנות.שיניים אלו מחוברות בתצורות שונות לאורך הסיבוב.
מפרט חשמלי
| דֶגֶם | זווית צעד (°/שלב) | חוט עופרת (לא.) | מתח (V) | נוֹכְחִי (A/Phase) | הִתנַגְדוּת (Ω/שלב) | הַשׁרָאוּת (MH/Phase) | מומנט מחזיק (G.CM) | גובה מנוע L(MM) | משקל מנוע (ק"ג) |
| 39BYGX001A | 1.8 | 4 | 13.44 | 0.48 | 28 | 21 | 1000 | 20 | 0.10 |
| 39BYGX002A | 1.8 | 4 | 8.4 | 0.7 | 12 | 11 | 1200 | 20 | 0.10 |
| 39BYGX100A | 1.8 | 4 | 12 | 0.4 | 30 | 20 | 1300 | 22 | 0.12 |
| 39BYGX200A | 1.8 | 4 | 14.4 | 0.4 | 36 | 33 | 1700 | 25 | 0 |
*ניתן להתאים מוצרים לפי בקשה מיוחדת.
תרשים חיווט

מימד מכני

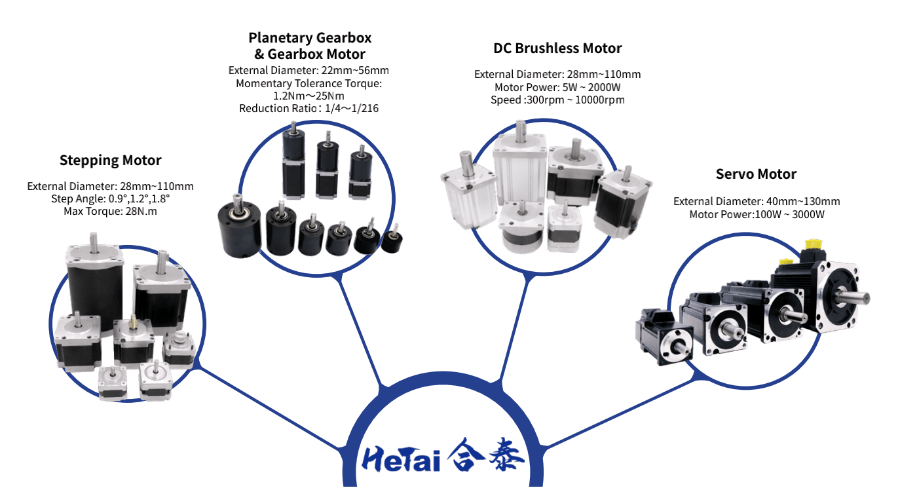
מגוון מוצרים
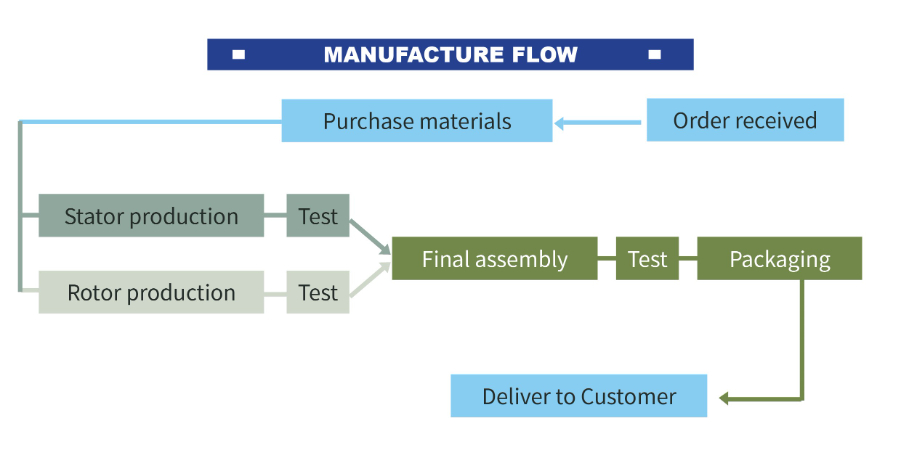
תהליך ייצור
תהליך בדיקה

תהליך בדיקה קפדני כדי להבטיח שכל מוצר הוא מוצר מוסמך, האיכות מובטחת.
תְעוּדָה