
변속기 57mm*57mm 주문화 9.6 V 1.8 정도 Nema 23 댄서 모터







명세서
| 상품명 | 변속기 스테퍼 모터 |
| 저항 | 30옴/위상 |
| 절연 저항 | 100MΩ 최소 500VC DC |
| 정격 전압 | 9.6V |
| 홀딩 토크 | 10kg.cm |
| 인덕턴스 | 20MH/상 |
| 샤프트의 방사형 플레이 | ≤0.03 |
| 샤프트의 스러스트 플레이 | ≤0.1 |
| 현재의 | 1A |
| 스텝 각도 | 1.8 학위 |
| 인증 | CE ROHS ISO |
| 절연 등급 | B |
제품 설명
기어박스가 있는 Nema23 스테퍼.높은 토크, 낮은 소음, 단계 각도: 1.8°, NEMA23, 57x57mm.Nema23 스테퍼 모터 기어 감속기.
스테퍼 기어박스는 플래닛 기어로 알려진 여러 개의 외부 링 기어를 구동하는 내부 태양 기어로 구성되어 있습니다.스테핑 기어박스 설계 전반에 걸친 다중 접점은 평 기어 모터에 비해 더 높은 토크 생성을 허용합니다.강도와 신뢰성을 높이기 위해 대부분 금속 기어박스로 구성됩니다.특정 상황에서는 플라스틱 기어를 제공할 수도 있습니다.ISL 유성 DC 기어 모터는 다양한 부하 및/또는 속도 요구 사항을 처리하는 동시에 지속적인 토크 부하에 대한 탁월한 옵션을 제공합니다.기어 모터 출력 요구 사항을 결정하면 올바른 감속 기어비를 구성할 수 있습니다.
전기 사양
| 모델 | 57BYGH231-05AG13 | |
| 스텝 앵글 | °/단계 | 1.8 |
| 정격 전압 | V | 9.6 |
| 현재의 | A/페이즈 | 1 |
| 저항 | Ω/위상 | 9.6 |
| 인덕턴스 | mH/PHASE | 20 |
| 유지 토크 | kg.cm | 10 |
| 변속기 직경 | mm | 56 |
| 길이 | mm | 104 |
| 무게 | kg | 1.10 |
| 절연 등급 | B | |
기계적 치수
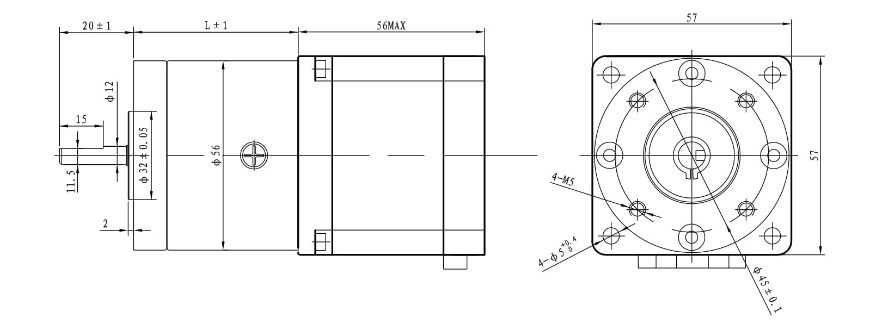
외경 56mm 분말 야금 기어박스

| 하우징 자재 | 출력 시 베어링 | 레이디얼 하중(플랜지에서 10mm)N | 축방향 하중(N) | 샤프트 압입력 max(N) | 샤프트의 레이디얼 플레이(mm) | 샤프트의 스러스트 플레이(mm) | 무부하 시 백래시(°) |
| 분말 야금 | 슬리브 베어링 | ≤450 | ≤200 | ≤1000 | ≤0.03 | ≤0.1 | ≤1.5 |
| 감소율 | 정격 허용 토크(Nm) | 최대 순간 허용 토크(Nm) | 능률% | 길이 L (mm) | 무게(g) | 기어 트레인의 수 |
| 1/4 | 2.0 | 6.0 | 81% | 41.3 | 491 | 1 |
| 1/6 | ||||||
| 1/15 | 8.0 | 25 | 72% | 59.6 | 700 | 2 |
| 1/18 | ||||||
| 1/26 | ||||||
| 1/47 | 16 | 50 | 72% | 59.6 | 700 | 2 |
| 1/66 |
기계적 치수
전기 사양
| 모델 | 57BYGH406-17AG6 | |
| 스텝 앵글 | °/단계 | 1.8 |
| 정격 전압 | V | 6.2 |
| 현재의 | A/페이즈 | 1.0 |
| 저항 | Ω/위상 | 6.2 |
| 인덕턴스 | mH/PHASE | 18 |
| 유지 토크 | kg.cm | 9 |
| 변속기 직경 | mm | 52 |
| 길이 | mm | 109 |
| 무게 | kg | 1.7 |
| 절연 등급 | B | |
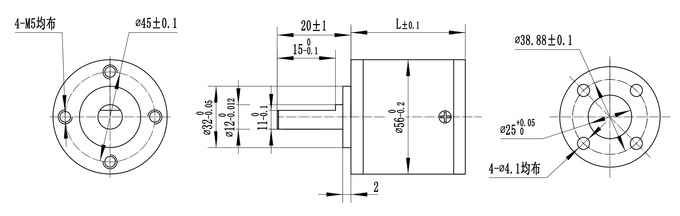
기계적 치수
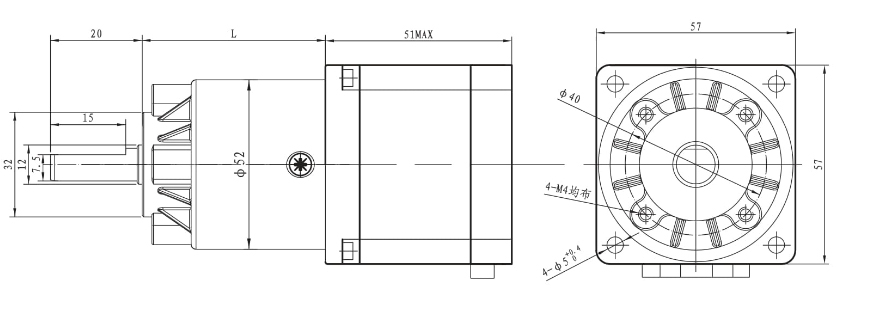
외경 52mm 분말 야금 기어박스
| 하우징 자재 | 출력 시 베어링 | 레이디얼 하중(플랜지에서 10mm)N | 축방향 하중(N) | 샤프트 압입력 max(N) | 샤프트의 레이디얼 플레이(mm) | 샤프트의 스러스트 플레이(mm) | 무부하 시 백래시(°) |
| 아연 합금 | 슬리브 베어링 | ≤450 | ≤200 | ≤1000 | ≤0.03 | ≤0.1 | ≤1.5 |
| 감소율 | 정격 허용 토크(Nm) | 최대 순간 허용 토크(Nm) | 능률% | 길이(mm) | 무게(g) | 기어 트레인의 수 |
| 1/13 | 2.0 | 6.0 | 81% | 52.9 | 345 | 1 |
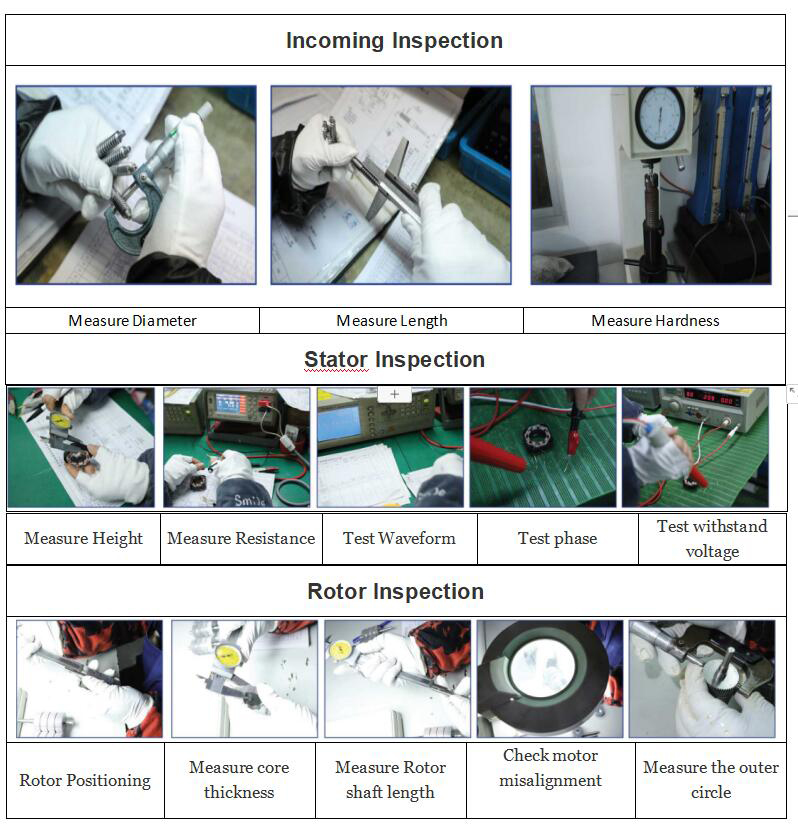
품질 관리 프로세스
시장 범위

장점
스테핑 기어 박스 모터의 장점
1. 제어 비용이 저렴합니다.
2. 시동 및 저속에서 높은 토크.
3. 견고함.
4. 건설의 단순성.
5. 개방 루프 제어 시스템에서 작동할 수 있습니다.
6. 낮은 유지 보수.
7. 실속이나 미끄러짐이 적습니다.
8. 어떤 환경에서도 작동합니다.
9. 로봇 공학에 광범위하게 사용할 수 있습니다.
10.높은 신뢰성.
11. 모터의 회전 각도는 입력 펄스에 비례합니다.





