
Caixa de velocidades 57mm*57mm Personalização 9,6 V 1,8 graus Nema 23 Motor de passo







Especificações
| Nome do Produto | Motor de passo da caixa de engrenagens |
| Resistência | 30 Ohms/Fase |
| Resistência de isolamento | 100MΩ Min.500VC DC |
| Tensão nominal | 9,6 V |
| Retenção de Torque | 10 Kg.cm |
| Indutância | 20 MH/Fase |
| Jogo radial do eixo | ≤0,03 |
| Jogo de Impulso do Eixo | ≤0,1 |
| Atual | 1A |
| Ângulo do passo | 1,8 Grau |
| Certificação | CE ROHS ISO |
| Classe de isolamento | B |
Descrição do produto
Nema23 Stepper com caixa de velocidades.Alto torque, baixo ruído, ângulo de passo: 1,8°, NEMA23, 57x57mm.Redutor de engrenagem do motor de passo Nema23.
As caixas de engrenagens deslizantes consistem em uma engrenagem solar interna que aciona várias engrenagens de anel externo conhecidas como engrenagens planetárias, daí seu nome.Vários pontos de contato em todo o projeto da caixa de engrenagens de passo permitem maior geração de torque em comparação com um motor de engrenagem de dentes retos.Para maior resistência e confiabilidade, a maioria é construída com uma caixa de engrenagens de metal.Em determinadas situações, também podemos fornecer engrenagens plásticas.Um motorredutor CC planetário ISL tem a capacidade de lidar com vários requisitos de carga e/ou velocidade, além de servir como uma excelente opção para cargas de torque contínuo.Uma vez que determinamos os requisitos de saída do motorredutor, podemos configurar a relação correta do redutor.
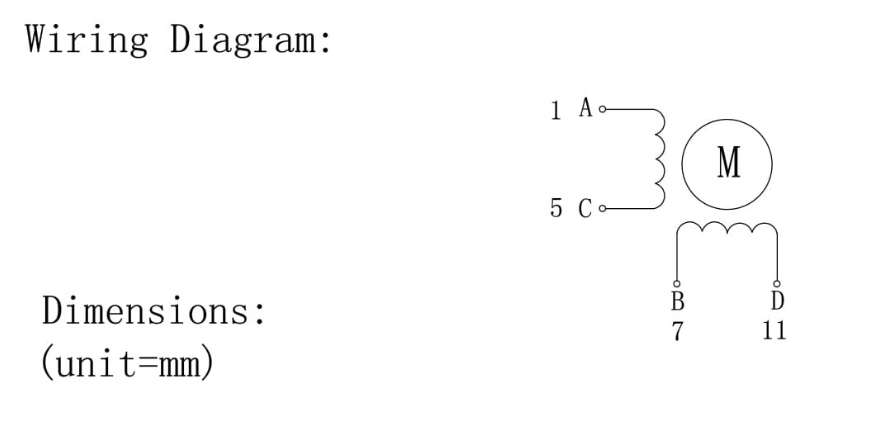
Especificação Elétrica
| Modelo | 57BYGH231-05AG13 | |
| ÂNGULO DO PASSO | °/ETAPA | 1,8 |
| TENSÃO NOMINAL | V | 9.6 |
| ATUAL | A/FASE | 1 |
| RESISTÊNCIA | Ω/FASE | 9.6 |
| INDUTÂNCIA | mH/FASE | 20 |
| MANTER TORQUE | Kg.cm | 10 |
| Diâmetro da caixa de engrenagens | mm | 56 |
| Comprimento | mm | 104 |
| Peso | kg | 1.10 |
| Classe de isolamento | B | |
Dimensão Mecânica
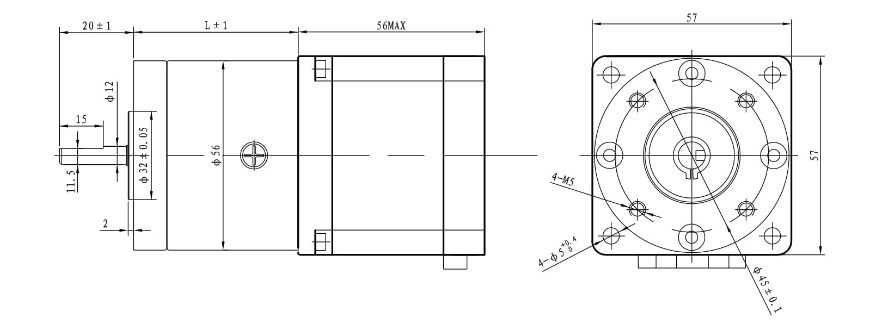
Caixa de engrenagens de metalurgia do pó de 56mm de diâmetro externo

| Material da carcaça | Rolamento na saída | Carga radial (10mm do flange)N | Carga axial do eixo (N) | Força máxima de encaixe por pressão do eixo (N) | Folga radial do eixo (mm) | Jogo de empuxo do eixo (mm) | Folga sem carga (°) |
| Metalurgia do pó | rolamentos de manga | ≤450 | ≤200 | ≤1000 | ≤0,03 | ≤0,1 | ≤1,5 |
| Taxa de redução | Torque de tolerância nominal (Nm) | Torque máximo de tolerância momentânea (Nm) | Eficiência% | Comprimento L (milímetros) | Peso (g) | Número de trens de engrenagens |
| 1/4 | 2,0 | 6,0 | 81% | 41,3 | 491 | 1 |
| 1/6 | ||||||
| 15/01 | 8,0 | 25 | 72% | 59,6 | 700 | 2 |
| 18/01 | ||||||
| 26/01 | ||||||
| 1/47 | 16 | 50 | 72% | 59,6 | 700 | 2 |
| 1/66 |
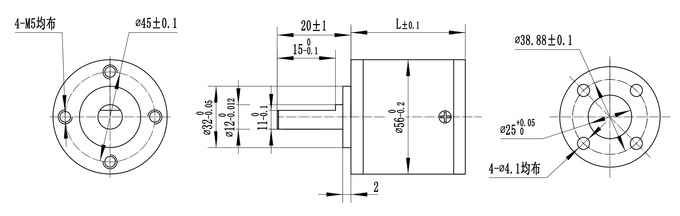
Dimensão Mecânica
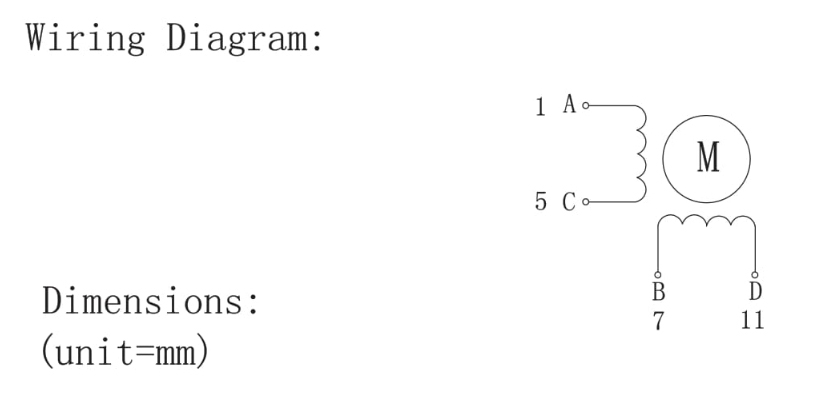
Especificação Elétrica
| Modelo | 57BYGH406-17AG6 | |
| ÂNGULO DO PASSO | °/ETAPA | 1,8 |
| TENSÃO NOMINAL | V | 6.2 |
| ATUAL | A/FASE | 1,0 |
| RESISTÊNCIA | Ω/FASE | 6.2 |
| INDUTÂNCIA | mH/FASE | 18 |
| MANTER TORQUE | Kg.cm | 9 |
| Diâmetro da caixa de engrenagens | mm | 52 |
| Comprimento | mm | 109 |
| Peso | kg | 1,7 |
| Classe de isolamento | B | |
Dimensão Mecânica
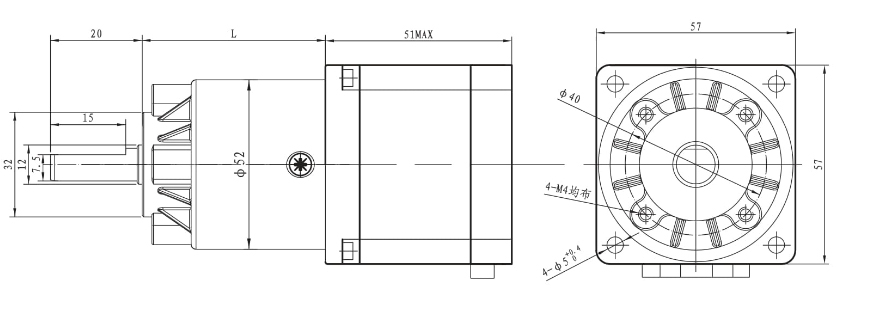
Caixa de engrenagens de metalurgia do pó de 52 mm de diâmetro externo
| Material da carcaça | Rolamento na saída | Carga radial (10mm do flange)N | Carga axial do eixo (N) | Força máxima de encaixe por pressão do eixo (N) | Folga radial do eixo (mm) | Jogo de empuxo do eixo (mm) | Folga sem carga (°) |
| Liga de Zinco | rolamentos de manga | ≤450 | ≤200 | ≤1000 | ≤0,03 | ≤0,1 | ≤1,5 |
| Taxa de redução | Torque de tolerância nominal (Nm) | Torque máximo de tolerância momentânea (Nm) | Eficiência% | Comprimento (mm) | Peso (g) | Número de trens de engrenagens |
| 13/01 | 2,0 | 6,0 | 81% | 52,9 | 345 | 1 |
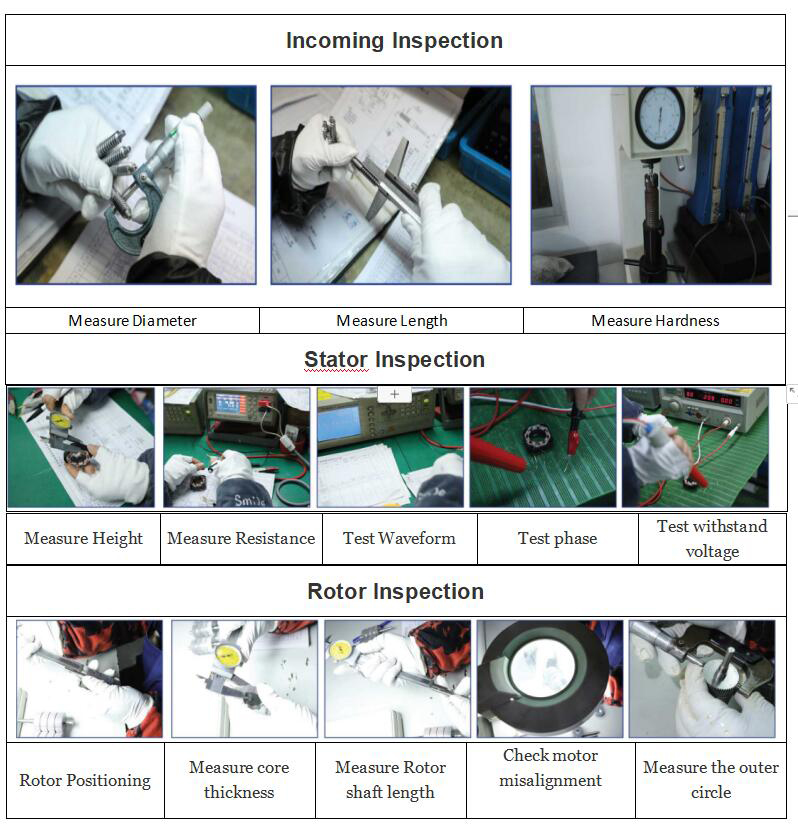
Processo de Controle de Qualidade
Faixa de mercado

Vantagens
Vantagens do motor da caixa de engrenagens passo a passo
1. Baixo custo para controle alcançado.
2.Alto torque na inicialização e baixas velocidades.
3.Robustez.
4.Simplicidade de construção.
5.Pode operar em um sistema de controle de circuito aberto.
6.Baixa manutenção.
7.Menos probabilidade de travar ou escorregar.
8. Funcionará em qualquer ambiente.
9.Pode ser usado em robótica em larga escala.
10. Alta confiabilidade.
11.O ângulo de rotação do motor é proporcional ao pulso de entrada.
Categorias de produtos
-

Caixa de velocidades 28mm*28mm Personalização 12 V 0,15 Nm N...
-

Motor BLDC com caixa de engrenagens de alta velocidade de alta qualidade...
-

Nema 23 Bldc Gearbox Motor 4 polos 24V Fábrica P...
-

Nema 23 Bldc Gearbox Motor 4 polos 24V Fábrica P...
-

Motor sem escova da caixa de engrenagens micro 22mm 0,87 polegadas 24...
-

Desempenho estável Nema 11 Gearbox Stepper Moto...





