
57mm Nema23 интегратсионӣ ба Stepper Motor 4 сим 1,8 Қадами кунҷи






Мушаххасоти
| Номи маҳсулот | Моторҳои ҳамгирошудаи Stepper |
| Кунҷи қадам | 1,8 ° |
| Моменти Ҳойдинг | 15 кг.см |
| Муқовимат | 0,5 Ом/фаза |
| Индуксия | 1,8 MH/Марҳила |
| Аниқии қадам | ± 5% |
| Баландшавии ҳарорат | 80 ℃ Макс |
| Ҳарорати муҳити зист | -20℃~+50℃ |
| Муқовимат ба изолятсия | 100МΩ Мин.500 VDC |
| Қувваи диэлектрикӣ | 500VAC 1 дақиқа |
| MAX Қувваи Радиал | 75N (10мм аз ҳалқаи пеши) |
| Қувваи акси MAX | 15 Н |
Тавсифи Маҳсулот
57mm Nema23 интегратсионӣ ба Stepper Motor 4 сим 1,8 Қадами кунҷи
Интегратсияшудаи Stepper Motor як системаи хеле сарфакоронаи идоракунии ҳаракат аст, зеро контролери дарунсохташудаи микроқадам ва электроникаи ронанда, ки ба маҷмӯа ворид карда шудаанд.Силсилаи Integrated Stepper Motor тахминҳоро аз мутобиқати муҳаррики Stepper ва ронанда мегирад.Моторҳои ҳамгирошудаи Stepper, ронандагон ва контроллерҳо дар андозаҳои NEMA 17 ва 23 мавҷуданд. Моторҳои қадами баланд дар силсилаи интегралии Stepper истифода мешаванд, кунҷи қадами 1,8 дараҷаро бо дарозии стек 1/2, 1, 2 ё 3 пешниҳод мекунанд. доираи васеи моменти оғоз то ва intertia.Агар ба шумо лозим аст, ки тағирот дар печҳои муҳаррики қадами худ анҷом дода шавад, тағиротҳои чоҳ ва иловакунакҳои рамзгузор барои назорати дурдасти мавқеъ дастрасанд.
| Шарҳ | IO57 | |||
|
| Арзиши ҳадди ақал | Арзиши маъмулӣ | Арзиши максималӣ | Воҳиди |
| Ҷараёни доимии баромад | 1.0 | - | 5.6 | A |
| Шиддати таъминоти барқ (DC) | 15 | 24/36 | 50 | Vdc |
| Назорати ҷараёни вуруди сигнал | 6 | 10 | 16 | mA |
| Назорати ҷараёни вуруди сигнал | - | 5 | - | Vdc |
| Паҳнои ҳадди ақали вақти набзи сатҳи баланди | 1.5 | - | - | US |
| Нуқтаи аз ҳад зиёд | 52 |
|
| Vdc |
| Басомади қадам | 0 | - | 200 | КГц |
| Муқовимат ба изолятсия | 100 |
|
| МΩ |
Диаграммаи пайвастшавӣ

Андозаи механикӣ

Муносиб барои як қатор таҷҳизот ва асбобҳои автоматии хурд ва миёна, аз қабили: Мошини кандакорӣ, мошини тамғагузорӣ, мошини буридан, таҷҳизоти тиббӣ, фототипи лазерӣ, плоттер, асбобҳои мошини CNC, таҷҳизоти васлкунии автоматӣ.Беҳтарин барои барномаҳое, ки корбар садои паст, ларзиши паст, гармии паст ва суръати баландро интизор аст
Дастури ронанда
IO57 як драйвери нави рақамии интегралӣ мебошад, ки бо технологияи коркарди рақамии 32-бити DSP, технологияи ҷорӣи тағйирёбанда ва технологияи гармидиҳии паст тарҳрезӣ шудааст.Он дорои бартариҳои пасти ларзиш, кори устувор, гармии паст ва эътимоднокии баланд мебошад.Истифодабарандагон метавонанд драйверро тавассути бандари силсилавии 200-51200 дар дохили воҳиди ихтиёрӣ ва баромади арзиши ҷорӣ муқаррар кунанд, то эҳтиёҷоти аксари барномаҳоро қонеъ кунанд.Дар робита ба истифода аз технологияи сохта-дар зерсохторњо, ҳатто дар шароити зерсохторњо паст, балки низ метавонад таъсири воҳиди баланд ноил, амалиёти паст, миёна ва баландсуръати хеле ҳамвор, ултра-садои паст аст.Ронанда дорои функсияи муҳаррики худкори мутобиқшавӣ мебошад, ки метавонад ба таври худкор параметрҳои оптималии кориро барои муҳаррикҳои гуногун тавлид кунад ва кори моторро ба ҳадди аксар расонад.
Барномаҳо
Муносиб барои як қатор таҷҳизот ва асбобҳои автоматии хурд ва миёна, аз қабили: Мошини кандакорӣ, мошини тамғагузорӣ, мошини буридан, таҷҳизоти тиббӣ, фототипи лазерӣ, плоттер, асбобҳои мошини CNC, таҷҳизоти васлкунии автоматӣ.Беҳтарин барои барномаҳое, ки корбар садои паст, ларзиши паст, гармии паст ва суръати баландро интизор аст.

Таҷҳизоти истеҳсолӣ

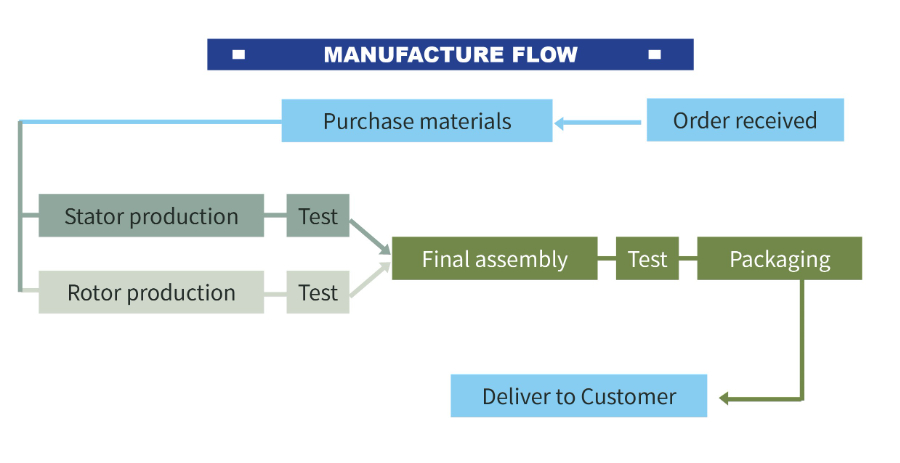
Раванди истеҳсолӣ
Хатти васлкунии касбӣ


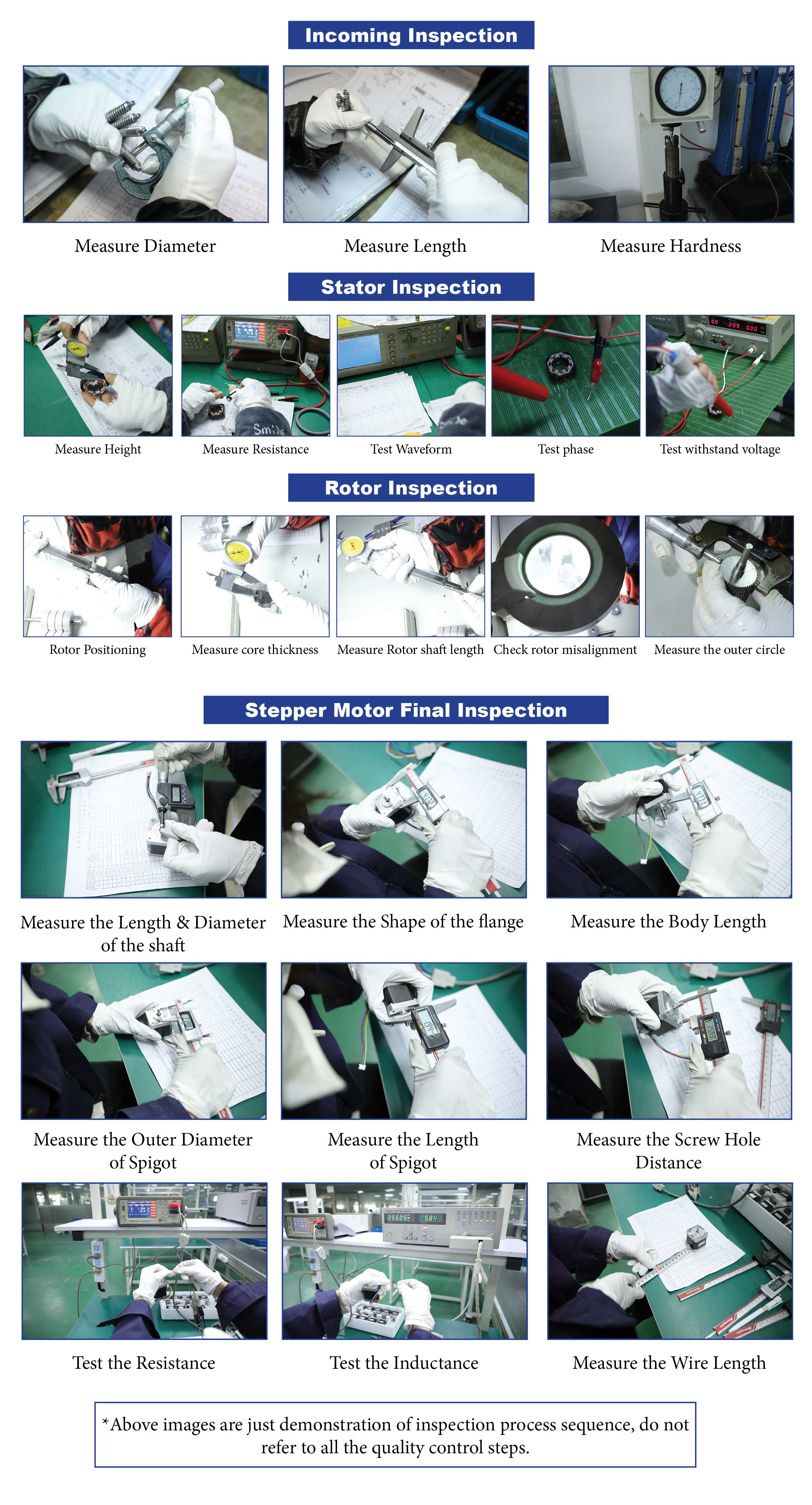
Раванди санҷиш
Категорияҳои маҳсулот
-

57mm Nema23 гибридии муҳаррики Stepper 4 боиси 1.8 St...
-

85mm Nema34 Hybrid Stepper Motor 6.8 Nm 3 Lead ...
-

110mm Nema42 гибридии муҳаррики Stepper 3 сим 1.2 S...
-

57mm Nema23 Hybrid Stepper Motor 4 боиси 6 сим...
-

110mm Nema42 Hybrid Stepper Motor 4 Wires 1.8 S...
-

57mm Nema23 Hybrid Stepper Motor 6V 4 Leads 6 W...





