
กระปุกเกียร์ 57 มม. * 57 มม. การปรับแต่ง 9.6 V 1.8 องศา Nema 23 Stepper Motor







ข้อมูลจำเพาะ
| ชื่อผลิตภัณฑ์ | สเต็ปเปอร์มอเตอร์เกียร์ |
| ความต้านทาน | 30 โอห์ม/เฟส |
| ความต้านทานของฉนวน | 100MΩ Min.500VC DC |
| จัดอันดับแรงดันไฟฟ้า | 9.6 V |
| ถือแรงบิด | 10 กก.ซม. |
| ตัวเหนี่ยวนำ | 20 MH/เฟส |
| การเล่นเรเดียลของเพลา | ≤0.03 |
| แรงขับของเพลา | ≤0.1 |
| หมุนเวียน | 1 อา |
| มุมขั้น | 1.8 องศา |
| ใบรับรอง | CE ROHS ISO |
| ชั้นฉนวน | B |
รายละเอียดสินค้า
Nema23 Stepper พร้อมกระปุกเกียร์แรงบิดสูง เสียงรบกวนต่ำ มุมขั้น: 1.8°, NEMA23, 57x57mm.Nema23 สเต็ปเปอร์มอเตอร์เกียร์ทดรอบ
กระปุกเกียร์แบบสเต็ปประกอบด้วยซันเกียร์ภายในที่ขับเฟืองวงแหวนรอบนอกหลายตัวที่เรียกว่าเฟืองดาวเคราะห์ จึงเป็นที่มาของชื่อจุดสัมผัสหลายจุดในการออกแบบกระปุกเกียร์แบบก้าวช่วยให้สร้างแรงบิดได้สูงขึ้นเมื่อเทียบกับมอเตอร์เกียร์แบบเดือยส่วนใหญ่สร้างด้วยกระปุกเกียร์โลหะเพื่อเพิ่มความแข็งแรงและความน่าเชื่อถือในบางสถานการณ์ เราสามารถจัดหาเฟืองพลาสติกได้มอเตอร์เกียร์ DC ของดาวเคราะห์ ISL มีความสามารถในการจัดการโหลดและหรือความเร็วที่ต้องการในขณะที่ยังเป็นตัวเลือกที่ยอดเยี่ยมสำหรับการโหลดแรงบิดอย่างต่อเนื่องเมื่อเรากำหนดความต้องการเอาท์พุตของมอเตอร์เกียร์แล้ว เราก็สามารถกำหนดค่าอัตราทดเกียร์ของการลดเกียร์ที่ถูกต้องได้
ข้อกำหนดทางไฟฟ้า
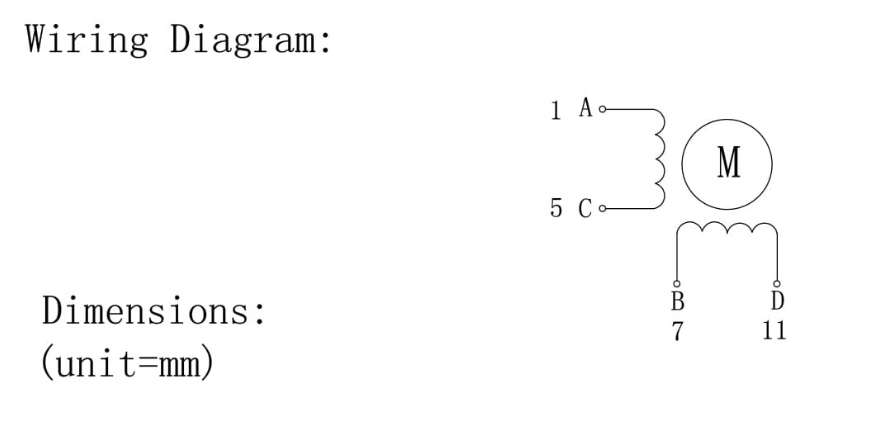
| แบบอย่าง | 57BYGH231-05AG13 | |
| ขั้นตอนมุม | °/STEP | 1.8 |
| จัดอันดับแรงดันไฟฟ้า | V | 9.6 |
| หมุนเวียน | A/เฟส | 1 |
| ความต้านทาน | Ω/เฟส | 9.6 |
| INDUCTANCE | mH/เฟส | 20 |
| ถือแรงบิด | กก.ซม. | 10 |
| เส้นผ่านศูนย์กลางกระปุก | mm | 56 |
| ความยาว | mm | 104 |
| น้ำหนัก | kg | 1.10 |
| ชั้นฉนวน | B | |
มิติเครื่องกล
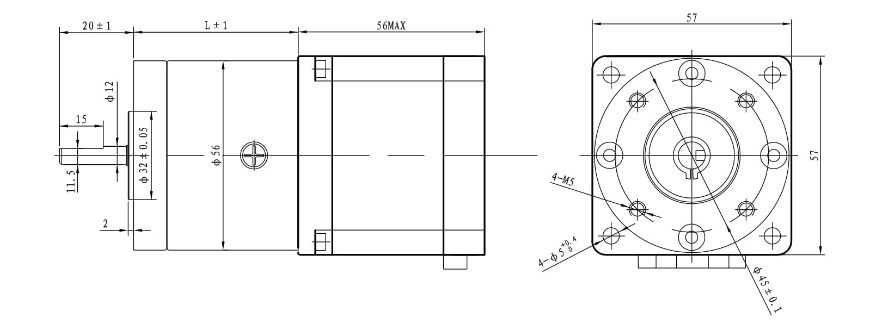
เส้นผ่านศูนย์กลางออก 56 มม. กระปุกเกียร์โลหะผง

| วัสดุตัวเรือน | แบริ่งที่เอาท์พุท | โหลดรัศมี (10 มม. จากหน้าแปลน) N | โหลดแกนเพลา (N) | แรงกดพอดีเพลาสูงสุด (N) | การเล่นเรเดียลของเพลา (มม.) | แรงขับของเพลา (มม.) | ฟันเฟืองที่ไม่มีโหลด (°) |
| ผงโลหะวิทยา | แบริ่งแขน | ≤450 | ≤200 | ≤1000 | ≤0.03 | ≤0.1 | ≤1.5 |
| อัตราส่วนการลด | พิกัดความเผื่อแรงบิด (Nm) | แรงบิดสูงสุดที่ยอมรับได้ชั่วขณะ (Nm) | ประสิทธิภาพ% | ความยาว L (มม.) | น้ำหนัก (ก.) | จำนวนรถไฟเกียร์ |
| 1/4 | 2.0 | 6.0 | 81% | 41.3 | 491 | 1 |
| 1/6 | ||||||
| 1/15 | 8.0 | 25 | 72% | 59.6 | 700 | 2 |
| 1/18 | ||||||
| 1/26 | ||||||
| 1/47 | 16 | 50 | 72% | 59.6 | 700 | 2 |
| 1/66 |
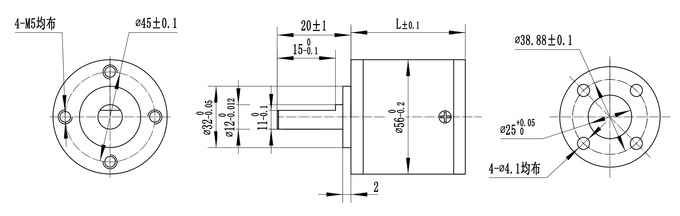
มิติเครื่องกล
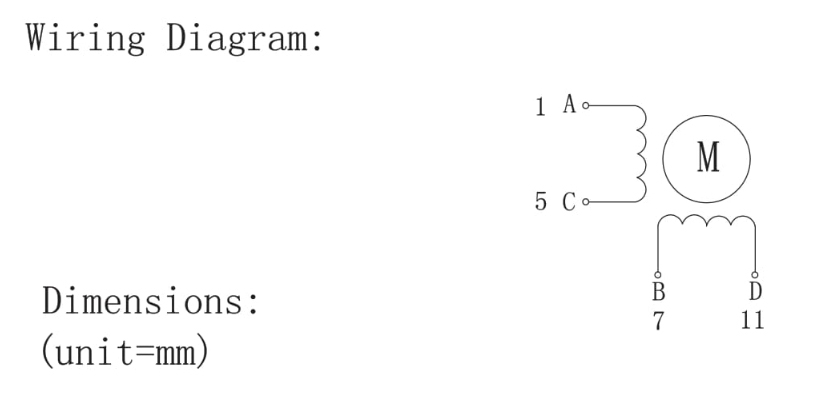
ข้อกำหนดทางไฟฟ้า
| แบบอย่าง | 57BYGH406-17AG6 | |
| ขั้นตอนมุม | °/STEP | 1.8 |
| จัดอันดับแรงดันไฟฟ้า | V | 6.2 |
| หมุนเวียน | A/เฟส | 1.0 |
| ความต้านทาน | Ω/เฟส | 6.2 |
| INDUCTANCE | mH/เฟส | 18 |
| ถือแรงบิด | กก.ซม. | 9 |
| เส้นผ่านศูนย์กลางกระปุก | mm | 52 |
| ความยาว | mm | 109 |
| น้ำหนัก | kg | 1.7 |
| ชั้นฉนวน | B | |
มิติเครื่องกล
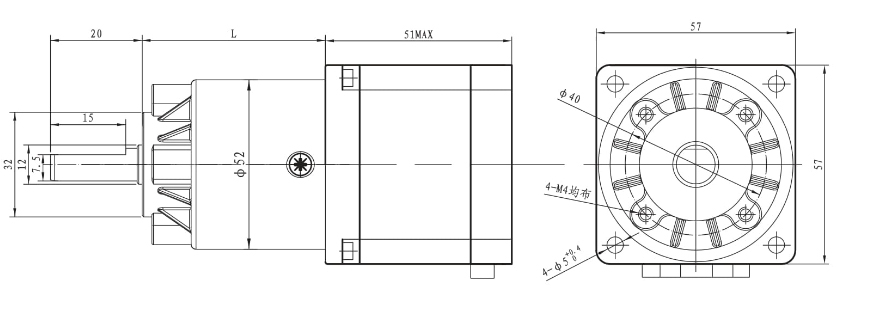
เส้นผ่านศูนย์กลางออก 52 มม. กระปุกเกียร์โลหะผง
| วัสดุตัวเรือน | แบริ่งที่เอาท์พุท | โหลดรัศมี (10 มม. จากหน้าแปลน) N | โหลดแกนเพลา (N) | แรงกดพอดีเพลาสูงสุด (N) | การเล่นเรเดียลของเพลา (มม.) | แรงขับของเพลา (มม.) | ฟันเฟืองที่ไม่มีโหลด (°) |
| โลหะผสมสังกะสี | แบริ่งแขน | ≤450 | ≤200 | ≤1000 | ≤0.03 | ≤0.1 | ≤1.5 |
| อัตราส่วนการลด | พิกัดความเผื่อแรงบิด (Nm) | แรงบิดสูงสุดที่ยอมรับได้ชั่วขณะ (Nm) | ประสิทธิภาพ% | ความยาว (มม.) | น้ำหนัก (ก.) | จำนวนรถไฟเกียร์ |
| 1/13 | 2.0 | 6.0 | 81% | 52.9 | 345 | 1 |
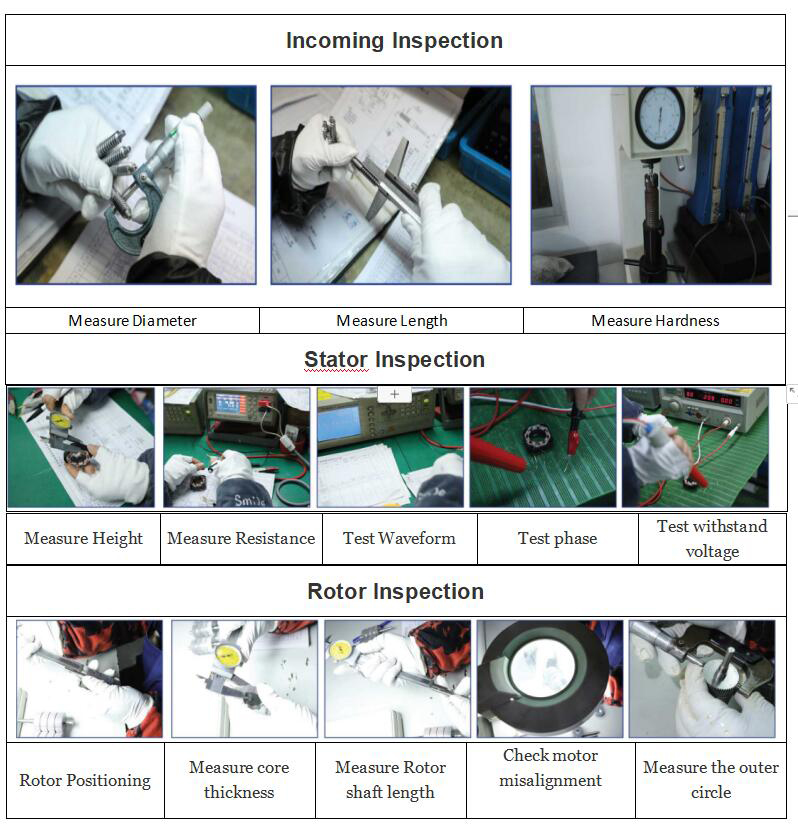
กระบวนการควบคุมคุณภาพ
ช่วงตลาด

ข้อดี
ข้อดีของสเต็ปปิ้งเกียร์มอเตอร์
1.ต้นทุนต่ำสำหรับการควบคุมทำได้
2. แรงบิดสูงเมื่อเริ่มต้นและความเร็วต่ำ
3.ความทนทาน
4.ความเรียบง่ายของการก่อสร้าง
5. สามารถทำงานในระบบควบคุมแบบวงเปิดได้
6. การบำรุงรักษาต่ำ
7. มีโอกาสน้อยที่จะสะดุดหรือลื่นไถล
8.จะทำงานในสภาพแวดล้อมใดๆ
9. สามารถใช้ในหุ่นยนต์ได้ในวงกว้าง
10. ความน่าเชื่อถือสูง
11.มุมการหมุนของมอเตอร์เป็นสัดส่วนกับพัลส์อินพุต
หมวดหมู่สินค้า
-

กระปุกเกียร์ 28mm * 28mm การปรับแต่ง 12 V 0.15 Nm N...
-

มอเตอร์ BLDC พร้อมกระปุกเกียร์ความเร็วสูงคุณภาพสูง...
-

Nema 23 Bldc มอเตอร์เกียร์ 4 ขั้ว 24V โรงงาน P...
-

Nema 23 Bldc มอเตอร์เกียร์ 4 ขั้ว 24V โรงงาน P...
-

Micro 22mm 0.87 นิ้วกระปุกเกียร์มอเตอร์ไร้แปรง 24...
-

ประสิทธิภาพที่เสถียร Nema 11 Gearbox Stepper Moto...





