28mm Nema11 ہائبرڈ سٹیپر موٹر 6 وائر 4 لیڈز 1.8 سٹیپ اینگل









وضاحتیں
| پروڈکٹ کا نام | ہائبرڈ سٹیپر موٹر |
| قدم کی درستگی | ± 5% |
| درجہ حرارت کا بڑھنا | 80 ℃ زیادہ سے زیادہ |
| موصلیت مزاحمت | 100MΩ کم از کم 500VDC |
| وسیع درجہ حرارت | -20℃~+50℃ |
| ڈائی الیکٹرک طاقت | 500VAC 1 منٹ |
| زیادہ سے زیادہ ریڈیل فورس | 28N (فرنٹ فلینج سے 20 ملی میٹر) |
| زیادہ سے زیادہ محوری قوت | 10N |
| سٹیپ اینگل | 1.8 ° |
| لیڈز کی تعداد | 4 یا 6 |
مصنوعات کی وضاحت
28mm Nema11 ہائبرڈ سٹیپر موٹر 6 وائر 4 لیڈز 1.8 سٹیپ اینگل
ایک مستقل مقناطیس اور متغیر ہچکچاہٹ جیسی دو موٹروں کا مجموعہ ہائبرڈ موٹر کے نام سے جانا جاتا ہے۔ہائبرڈ موٹر کا کام کرنے کا اصول یہ ہے کہ اس موٹر میں روٹر ایک مستقل مقناطیس سٹیپر موٹر کی طرح محوری طور پر مقناطیسی ہوتا ہے، جبکہ سٹیٹر ایک متغیر ہچکچاہٹ سٹیپر موٹر کی طرح برقی مقناطیسی طور پر متحرک ہوتا ہے۔لہذا یہ ایک ایکچوایٹر ہے جو برقی دالوں کو کونیی نقل مکانی میں تبدیل کرتا ہے۔
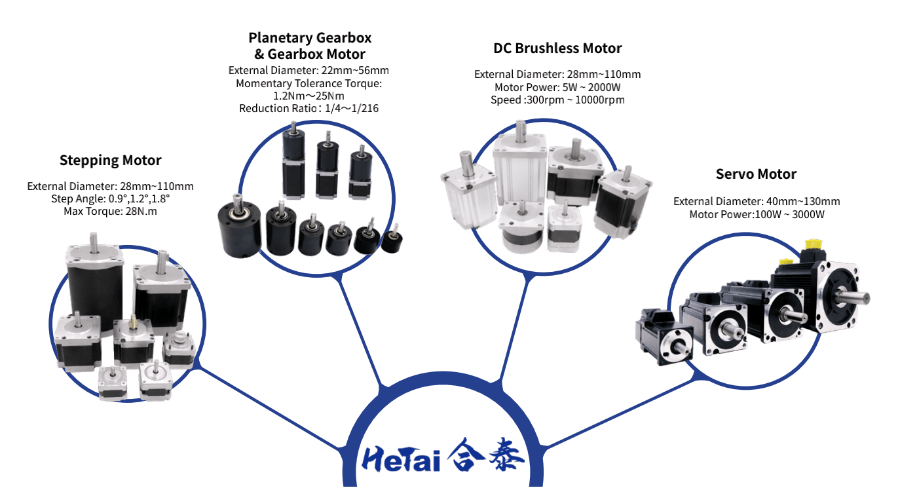
دیگر اقسام کے مقابلے میں، ہائبرڈ سٹیپر موٹر کم سٹیپ اینگل سمیت ہائی ٹارک فراہم کرتی ہے اور اس میں اچھی ڈائنامک پراپرٹی ہے۔اسی طرح مختلف شعبوں جیسے روبوٹکس، انڈسٹریل آٹومیشن، میڈیکل وغیرہ میں سٹیپر موٹرز کے استعمال میں بھی اضافہ ہوا ہے۔
ہائبرڈ سٹیپر موٹرز مختلف اقسام میں دستیاب ہیں یعنی بنیادی، انکوڈر، IP65، بریک، انٹیگریٹڈ قسم بشمول ڈرائیو اور کنٹرولر، بریک، اور گیئرڈ۔
برقی تفصیلات
| ماڈل | سٹیپ اینگل (°/STEP) | لیڈ وائر (نہیں.) | وولٹیج (V) | کرنٹ (A/FASE) | مزاحمت (Ω/فیز) | انڈکٹنس (MH/PHASE) | ہولڈنگ ٹارک (G.CM) | موٹر کی اونچائی L(MM) | موٹر وزن (کلو) |
| 28BYGH102-01 | 1.8 | 4 | 3.90 | 0.67 | 6.3 | 3.2 | 600 | 32 | 0.11 |
| 28BYGH105-01 | 1.8 | 6 | 3.1 | 0.95 | 3.3 | 1.0 | 430 | 32 | 0.11 |
| 28BYGH301 | 1.8 | 4 | 4.56 | 0.67 | 6.8 | 4.9 | 950 | 45 | 0.17 |
| 28BYGH303 | 1.8 | 6 | 3.40 | 0.95 | 3.4 | 1.0 | 750 | 45 | 0.14 |
| 28BYGH501 | 1.8 | 4 | 8.04 | 0.67 | 12.0 | 7.2 | 1200 | 51 | 0.19 |
| 28BYGH502 | 1.8 | 6 | 3.80 | 0.95 | 4.0 | 1.3 | 900 | 51 | 0.20 |
*مصنوعات کو خصوصی درخواست کے ذریعہ اپنی مرضی کے مطابق بنایا جاسکتا ہے۔
وائرنگ ڈایاگرام

مکینیکل ڈائمینشن

تعمیر اور کام کرنے کا اصول
ایک سٹیپر موٹر کی تعمیر کافی حد تک ڈی سی موٹر سے متعلق ہے۔اس میں روٹر کی طرح ایک مستقل مقناطیس شامل ہے جو درمیان میں ہوتا ہے اور جب اس پر طاقت کام کرتی ہے تو یہ مڑ جاتا ہے۔یہ روٹر نمبر کے ذریعے بند ہے۔سٹیٹر کا جو ایک مقناطیسی کنڈلی کے ذریعے اس کے چاروں طرف زخم لگا ہوا ہے۔سٹیٹر کو روٹر کے قریب ترتیب دیا گیا ہے تاکہ سٹیٹرز کے اندر مقناطیسی فیلڈز روٹر کی حرکت کو کنٹرول کر سکیں۔
سرٹیفیکیٹ