39mm Nema16 ہائبرڈ سٹیپر موٹر 0.17Nm 4 لیڈز 1.8 سٹیپ اینگل





وضاحتیں
| پروڈکٹ کا نام | ہائبرڈ سٹیپر موٹر |
| قدم کی درستگی | ± 5% |
| درجہ حرارت کا بڑھنا | 80 ℃ زیادہ سے زیادہ |
| موصلیت مزاحمت | 100MΩ کم از کم 500VDC |
| وسیع درجہ حرارت | -20℃~+50℃ |
| ڈائی الیکٹرک طاقت | 500VAC 1 منٹ |
| زیادہ سے زیادہ ریڈیل فورس | 28N (فرنٹ فلینج سے 20 ملی میٹر) |
| زیادہ سے زیادہ محوری قوت | 10N |
| سٹیپ اینگل | 1.8 ° |
| لیڈ وائر نمبر | 4 |
| مزاحمت | 28Ω |
| انڈکٹنس | 21mH |
مصنوعات کی وضاحت
39mm Nema16 ہائبرڈ سٹیپر موٹر 0.28Nm 4 لیڈز 1.8 سٹیپ اینگل 2.8KG
ہائبرڈ سٹیپر موٹر کی تعمیر دو موٹروں جیسے مستقل مقناطیس اور متغیر ہچکچاہٹ سٹیپر موٹر کے اصولوں کو استعمال کرتے ہوئے کی جا سکتی ہے۔اس قسم کی موٹریں مختلف سٹیپ ریزولوشنز کے ساتھ دستیاب ہیں۔ اس موٹر کی معیاری سٹیپ ریزولوشن 1.8° ہے۔
ہائبرڈ سٹیپر موٹر انتہائی سٹیپ ریٹ پر ہائی سٹیٹک اور ڈائنامک ٹارک اور رن کی خصوصیات دکھاتی ہے، لہذا، یہ موٹرز بنیادی طور پر صنعتی ایپلی کیشنز میں استعمال ہوتی ہیں۔ہائبرڈ سٹیپر موٹر میں ضروری حصے سٹیٹر اور روٹر ہیں کیونکہ یہ دونوں ہائبرڈ موٹر کو جوڑتے ہیں۔اس موٹر میں تخمینوں کی طرح ایک دانت شامل ہے۔یہ دانت پوری گردش میں مختلف ترتیبوں میں جڑے ہوتے ہیں۔
برقی تفصیلات
| ماڈل | سٹیپ اینگل (°/قدم) | لیڈ وائر (نہیں.) | وولٹیج (V) | کرنٹ (A/مرحلہ) | مزاحمت (Ω/مرحلہ) | انڈکٹنس (MH/مرحلہ) | ٹارک ہولڈنگ (G.CM) | موٹر کی اونچائی L(MM) | موٹر وزن (کلو) |
| 39BYGX001A | 1.8 | 4 | 13.44 | 0.48 | 28 | 21 | 1000 | 20 | 0.10 |
| 39BYGX002A | 1.8 | 4 | 8.4 | 0.7 | 12 | 11 | 1200 | 20 | 0.10 |
| 39BYGX100A | 1.8 | 4 | 12 | 0.4 | 30 | 20 | 1300 | 22 | 0.12 |
| 39BYGX200A | 1.8 | 4 | 14.4 | 0.4 | 36 | 33 | 1700 | 25 | 0 |
*مصنوعات کو خصوصی درخواست کے ذریعہ اپنی مرضی کے مطابق بنایا جاسکتا ہے۔
وائرنگ ڈایاگرام

مکینیکل ڈائمینشن

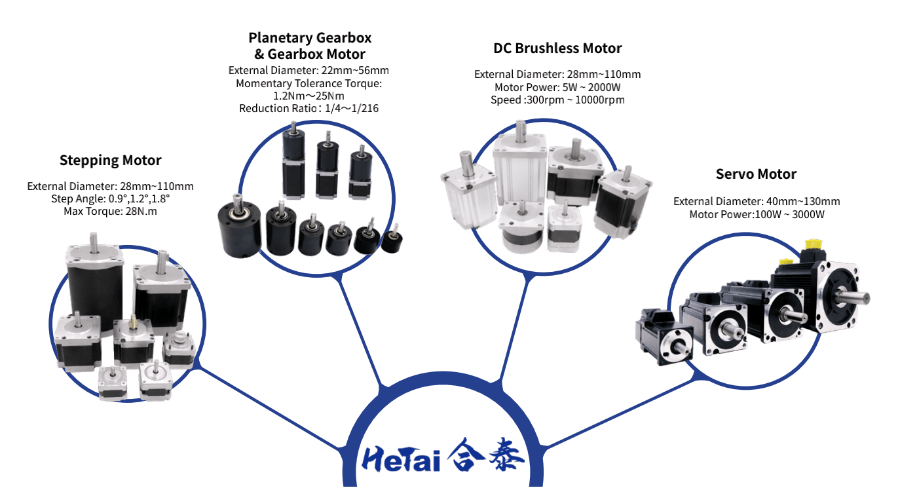
مصنوعات کی رینج
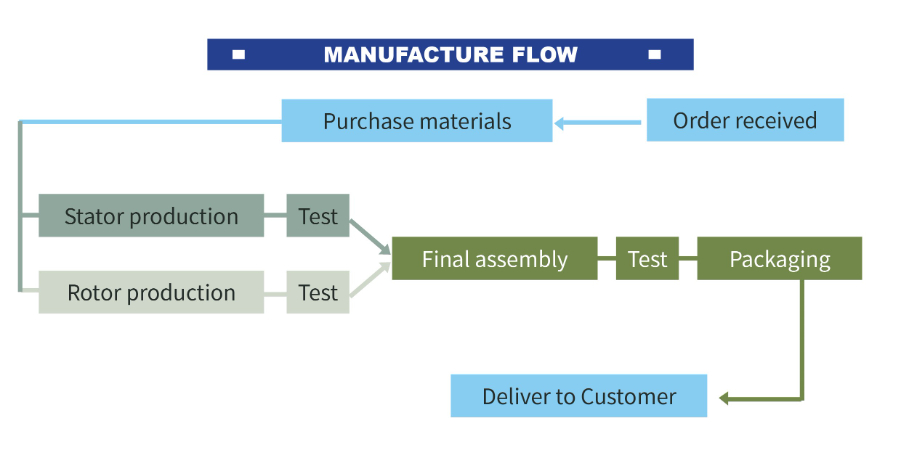
پیداواری عمل
معائنہ کا عمل

اس بات کو یقینی بنانے کے لیے سخت معائنہ کا عمل کہ ہر پروڈکٹ ایک مستند پروڈکٹ ہے، معیار کی ضمانت ہے۔
سرٹیفیکیٹ