
85mm Nema34 ہائبرڈ سٹیپر موٹر 6.8 Nm 3 لیڈ وائرز 1.2 سٹیپ اینگل

وضاحتیں
| پروڈکٹ کا نام | ہائبرڈ سٹیپر موٹر |
| قدم کی درستگی | ± 5% |
| درجہ حرارت کا بڑھنا | 80 ℃ زیادہ سے زیادہ |
| موصلیت مزاحمت | 100MΩ کم از کم 500VDC |
| وسیع درجہ حرارت | -20℃~+50℃ |
| ڈائی الیکٹرک طاقت | 500VAC 1 منٹ |
| زیادہ سے زیادہ ریڈیل فورس | 220N (فرنٹ فلینج سے 20 ملی میٹر) |
| زیادہ سے زیادہ محوری قوت | 60N |
| سٹیپ اینگل | 1.2° |
| لیڈ وائر نمبر | 3 |
| موٹر وزن (کلوگرام) | 1.7/2.9/4.0 |
مصنوعات کی وضاحت
85mm Nema34 ہائبرڈ سٹیپر موٹر 2 Nm 3 لیڈ وائرز 1.2 سٹیپ اینگل
ہائبرڈ سٹیپر موٹر کو ایک ایک کر کے ہر سٹیٹر کو توانائی دے کر کنٹرول کیا جا سکتا ہے۔لہذا اسٹیٹر مقناطیسی کرے گا اور ایک برقی مقناطیسی قطب کی طرح کام کرے گا جو آگے بڑھنے کے لیے روٹر پر قابل نفرت توانائی استعمال کرتا ہے۔سٹیٹر کا متبادل میگنیٹائزنگ کے ساتھ ساتھ ڈی میگنیٹائزنگ روٹر کو بتدریج شفٹ کر دے گا اور اسے زبردست کنٹرول سے گزرنے دیتا ہے۔
سٹیپر موٹر کام کرنے کا اصول الیکٹرو میگنیٹزم ہے۔اس میں ایک روٹر شامل ہے جو مستقل مقناطیس کے ساتھ بنایا گیا ہے جبکہ ایک سٹیٹر برقی مقناطیس کے ساتھ ہے۔ایک بار جب سٹیٹر کے وائنڈنگ کو سپلائی فراہم کر دی جائے گی تو سٹیٹر کے اندر مقناطیسی میدان تیار ہو جائے گا۔اب موٹر میں روٹر سٹیٹر کے گھومنے والے مقناطیسی میدان کے ساتھ حرکت کرنا شروع کر دے گا۔تو یہ اس موٹر کا بنیادی کام کرنے کا اصول ہے۔
برقی تفصیلات
| ماڈل | سٹیپ اینگل (°/STEP) | لیڈ وائر (نہیں.) | وولٹیج (V) | کرنٹ (A/FASE) | مزاحمت (Ω/فیز) | انڈکٹنس (MH/PHASE) | ہولڈنگ ٹارک (NM) | موٹر کی اونچائی L(MM) | موٹر وزن (کلو) |
| 85BYGH350A-001 | 1.2 | 3 | 3.1 | 3.1 | 1.0 | 4.1 | 2.0 | 68 | 1.7 |
| 85BYGH350A-002 | 1.2 | 3 | 7.4 | 1.75 | 4.25 | 12.3 | 2.3 | 68 | 1.7 |
| 85BYGH350B-001-17 | 1.2 | 3 | 3.1 | 5.8 | 0.53 | 2.5 | 3.2 | 97 | 2.9 |
| 85BYGH350B-002-02 | 1.2 | 3 | 10.8 | 2.0 | 5.4 | 23.0 | 4.5 | 97 | 2.9 |
| 85BYGH350C-001-02 | 1.2 | 3 | 3.7 | 7.0 | 0.53 | 2.5 | 5.6 | 127 | 4.0 |
| 85BYGH350C-003 | 1.2 | 3 | 21.0 | 3.5 | 6.0 | 25.0 | 6.8 | 127 | 4.0 |
*مصنوعات کو خصوصی درخواست کے ذریعہ اپنی مرضی کے مطابق بنایا جاسکتا ہے۔
وائرنگ ڈایاگرام

مکینیکل ڈائمینشن

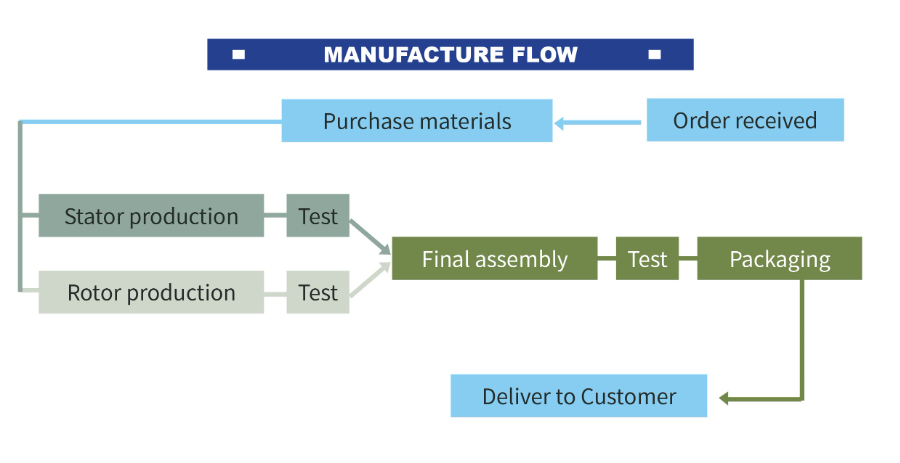
پیداواری عمل
جدید ترین پیداواری سامان





سرٹیفیکیٹ

