
Gearbox 57mm*57mm Customization 9.6 V 1.8 Degree Nema 23 Stepper Motor







Specifications
| Product Name | Gearbox Stepper Motor |
| Resistance | 30 Ohms/Phase |
| Insulation Resistance | 100MΩ Min.500VC DC |
| Rated Voltage | 9.6 V |
| Holding Torque | 10 Kg.cm |
| Inductance | 20 MH/Phase |
| Radial Play Of Shaft | ≤0.03 |
| Thrust Play Of Shaft | ≤0.1 |
| Current | 1 A |
| Step Angle | 1.8 Degree |
| Certification | CE ROHS ISO |
| Insulation Class | B |
Product Description
Nema23 Stepper With Gearbox. High torque, Low noise, Step Angle: 1.8°, NEMA23, 57x57mm. Nema23 stepper motor gear reducer.
A stepper gearboxes consist of an internal sun gear that drives multiple outer ring gears known as planet gears, hence its name. Multiple contact points across the stepping gearbox design allows for higher torque generation compared to a spur gear motor. For added strength and reliability, most are constructed with a metal gearbox. In certain situations, we can also provide plastic gearing. An ISL planetary dc gear motor has the ability to handle various load and or speed requirements while also serving as an excellent option for continuous torque loads. Once we determine the gear motor output requirements we can configure the correct reduction gear ratio.
Electrical Specification
|
Model |
57BYGH231-05AG13 |
|
|
STEP ANGLE |
°/STEP |
1.8 |
|
RATED VOLTAGE |
V |
9.6 |
|
CURRENT |
A/PHASE |
1 |
|
RESISTANCE |
Ω/PHASE |
9.6 |
|
INDUCTANCE |
mH/PHASE |
20 |
|
HOLDING TORQUE |
Kg.cm |
10 |
|
Gearbox Diameter |
mm |
56 |
|
Length |
mm |
104 |
|
Weight |
kg |
1.10 |
|
Insulation Class |
B |
|
Mechanical Dimension
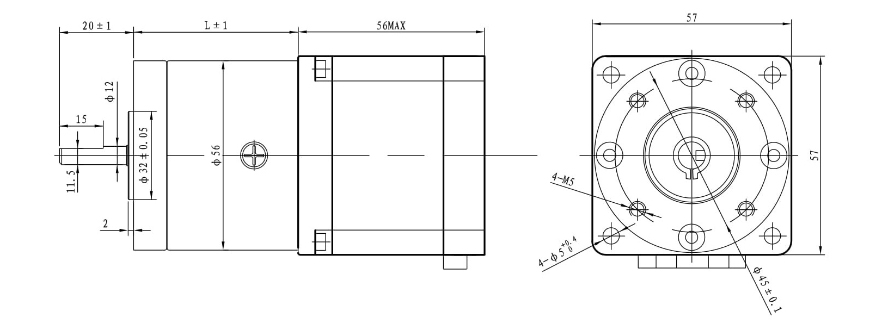
Out diameter 56mm Powder metallurgy gearbox

|
Housing material |
Bearing at output |
Radial load(10mm from flange)N |
Shaft axial load(N) |
Shaft press-fit force max(N) |
Radial play of shaft(mm) |
Thrust play of shaft(mm) |
Backlash at no-load (°) |
|
Powder metallurgy |
sleeve bearings |
≤450 |
≤200 |
≤1000 |
≤0.03 |
≤0.1 |
≤1.5 |
|
Reduction ratio |
Rated tolerance torque (Nm) |
Max momentary tolerance torque (Nm) |
Efficiency% |
Length L (mm) |
Weight(g) |
Number of gear trains |
|
1/4 |
2.0 |
6.0 |
81% |
41.3 |
491 |
1 |
|
1/6 |
||||||
|
1/15 |
8.0 |
25 |
72% |
59.6 |
700 |
2 |
|
1/18 |
||||||
|
1/26 |
||||||
|
1/47 |
16 |
50 |
72% |
59.6 |
700 |
2 |
|
1/66 |
Mechanical Dimension
Electrical Specification
|
Model |
57BYGH406-17AG6 |
|
|
STEP ANGLE |
°/STEP |
1.8 |
|
RATED VOLTAGE |
V |
6.2 |
|
CURRENT |
A/PHASE |
1.0 |
|
RESISTANCE |
Ω/PHASE |
6.2 |
|
INDUCTANCE |
mH/PHASE |
18 |
|
HOLDING TORQUE |
Kg.cm |
9 |
|
Gearbox Diameter |
mm |
52 |
|
Length |
mm |
109 |
|
Weight |
kg |
1.7 |
|
Insulation Class |
B |
|
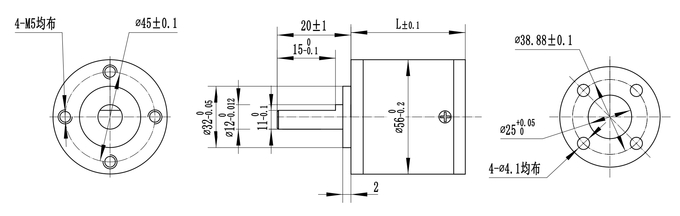
Mechanical Dimension
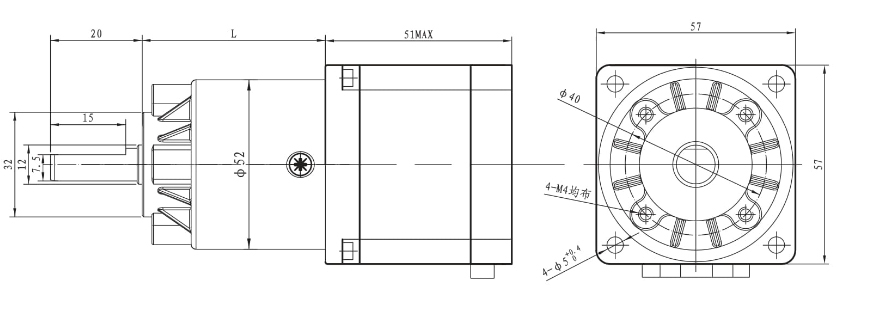
Out diameter 52mm Powder metallurgy gearbox
|
Housing material |
Bearing at output |
Radial load(10mm from flange)N |
Shaft axial load(N) |
Shaft press-fit force max(N) |
Radial play of shaft(mm) |
Thrust play of shaft(mm) |
Backlash at no-load (°) |
|
Zinc alloy |
sleeve bearings |
≤450 |
≤200 |
≤1000 |
≤0.03 |
≤0.1 |
≤1.5 |
|
Reduction ratio |
Rated tolerance torque (Nm) |
Max momentary tolerance torque (Nm) |
Efficiency% |
Length (mm) |
Weight(g) |
Number of gear trains |
|
1/13 |
2.0 |
6.0 |
81% |
52.9 |
345 |
1 |
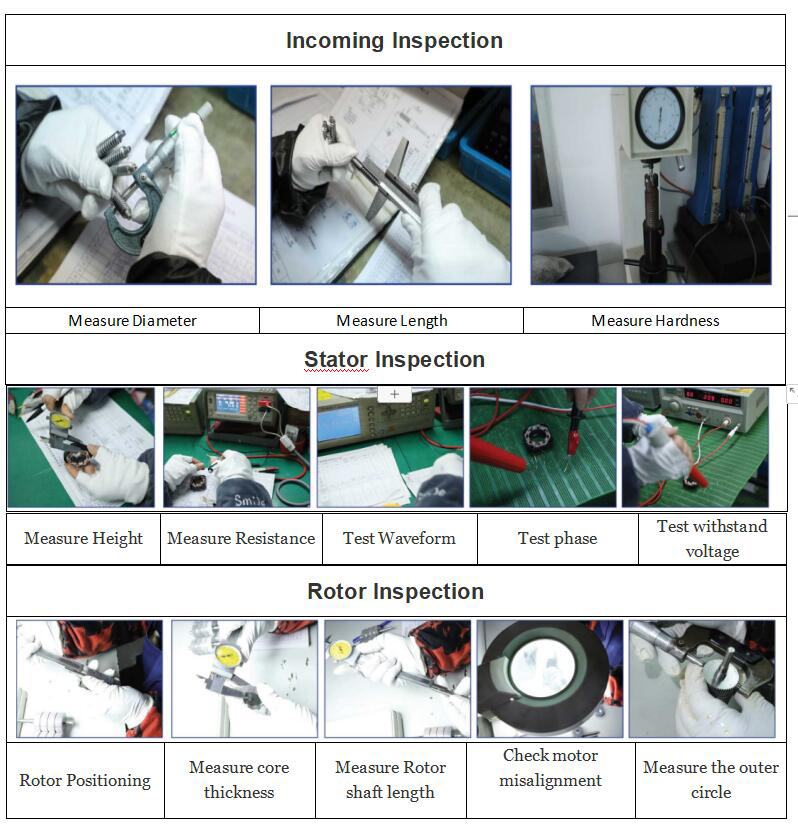
Quality Control Process
Market Range

Advantages
Advantages of stepping gearbox motor
1.Low cost for control achieved.
2.High torque at startup and low speeds.
3.Ruggedness.
4.Simplicity of construction.
5.Can operate in an open loop control system.
6.Low maintenance.
7.Less likely to stall or slip.
8.Will work in any environmen.
9.Can be used in robotics in a wide scale.
10.High reliability.
11.The rotation angle of the motor is proportional to the input pulse.
Products categories
-

57BYGH236-01AG6 0.55A Nema 23 High Torque Gearb...
-

42BLF01-027AG16 24V High Output 18.3W Planetary...
-

Hot sale 42BLY01A-005AG62 24V wholesale CE ROHS...
-

42BYGH835-08AG16 Customized Low Noise Stepper P...
-

Nema 23 Bldc Gearbox Motor 4 Pole 24V Factory P...
-

Gearbox High Quailty Nema 14 Low Noise2.4 OHMS ...





